
Unity ML-Agents: Autonomous Systems Research
Research
About The Project
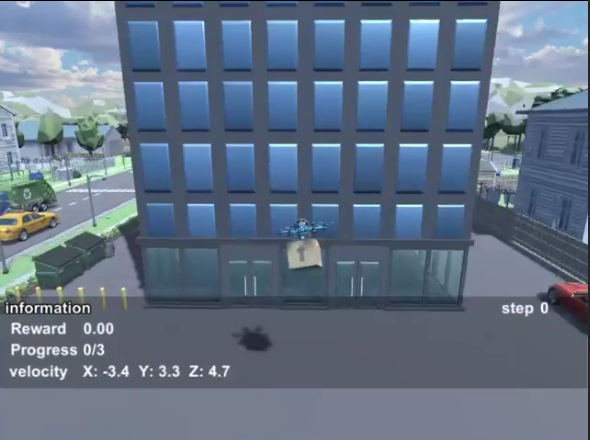
Reinforcement learning research projects for autonomous drone delivery and crossroad vehicle navigation
Key Achievements
—Participated in 2021 RLKR Drone Delivery Challenge developing autonomous drone navigation with Unity ML-Agents
—Implemented complex crossroad autonomous driving environment with multi-agent collision detection and interaction
—Designed realistic 8-lane crossroad simulation based on Gangnam Station area using BlenderGIS for accurate building models
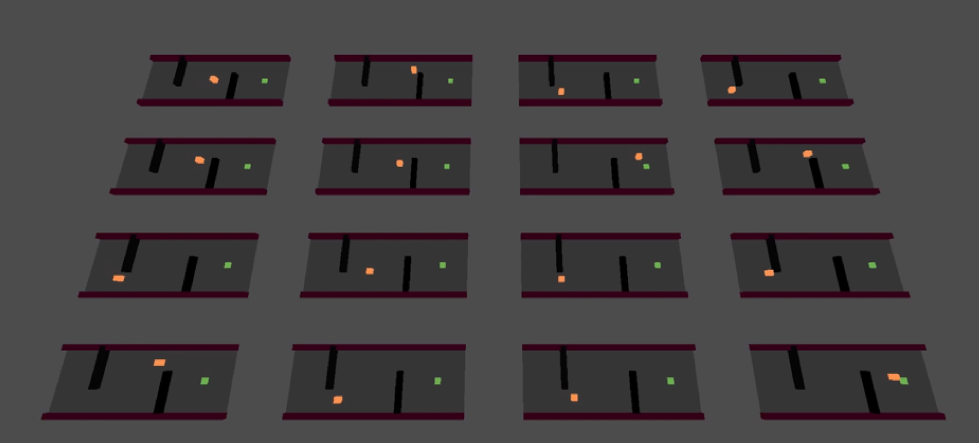
—Developed checkpoint system with reward function optimization to prevent unintended learning patterns
—Applied Epsilon-greedy algorithm (ε=0.9) for balanced exploration-exploitation in multi-agent scenarios
—Configured Ray Perception Sensor 3D for agent detection and collision avoidance in dense traffic environments
—Presented research at Korean Society of Information Science and Technology conference and advanced to finals
—Demonstrated applicability of reinforcement learning to complex real-world autonomous navigation scenarios
Project Files
More Projects

Wartime Resource Analysis Program
Automated logistics calculation system for military supply requirement analysis during wartime operations
↗

Radar Detection Range Analysis
Detection range analysis program for air defense operations
↗
Wargame Simulation Automation
Python macro for automated target data input
↗
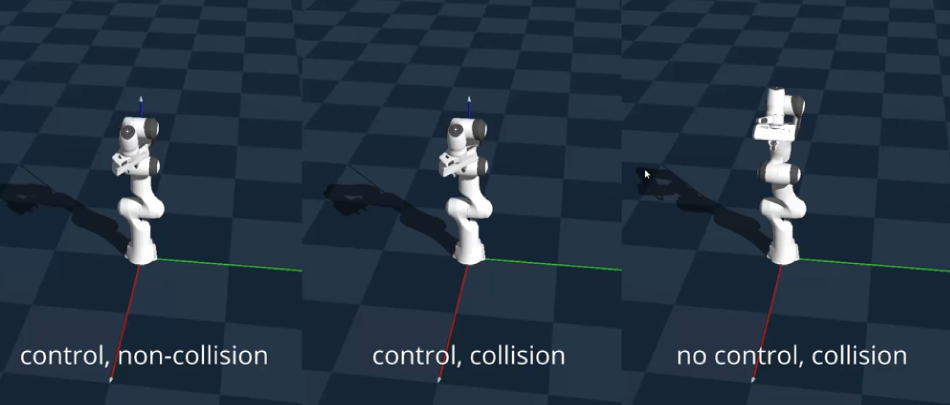
Genesis AI Military Application Research
Research on physics-based AI simulation for military reinforcement learning applications
↗
Air Force AI Education Program
Comprehensive AI education program for Air Force personnel covering reinforcement learning and modern AI tools
↗
Fusion 360 URDF Generation
Robot simulation tool expansion using Fusion 360 API
↗