
F-ARM: Fault Diagnosis for Robotic Arm
Research
About The Project
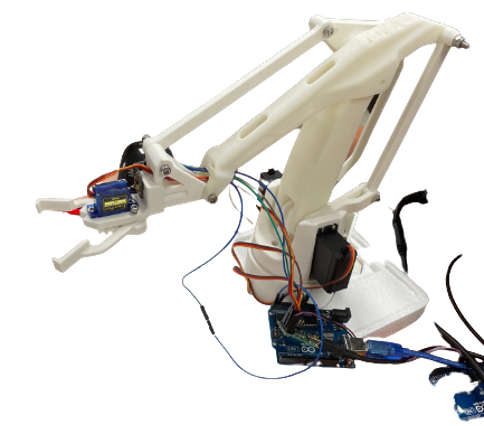
Deep learning-based fault diagnosis system for robotic arm anomaly detection using sensor data analysis
Key Achievements
—Developed deep learning-based fault diagnosis system for robotic arm anomaly detection using multi-sensor data
—Implemented CNN and LSTM models for real-time fault classification achieving high accuracy in bearing defect detection
—Collected and preprocessed vibration sensor data from robotic arm joints for training machine learning models
—Won Grand Prize in Mechanical Engineering Capstone Design Competition (2021)
—Published graduation thesis applying deep learning techniques to mechanical engineering fault diagnosis
—Created automated data collection pipeline and feature extraction system for continuous monitoring
Project Files
More Projects

Wartime Resource Analysis Program
Automated logistics calculation system for military supply requirement analysis during wartime operations
↗

Radar Detection Range Analysis
Detection range analysis program for air defense operations
↗
Wargame Simulation Automation
Python macro for automated target data input
↗
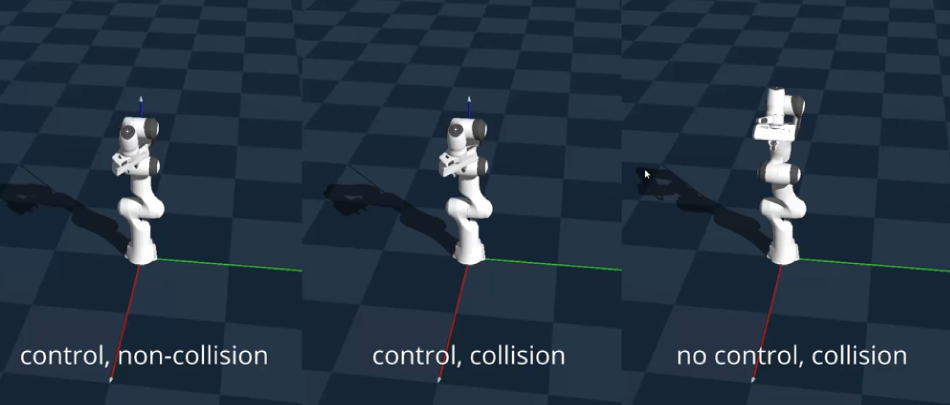
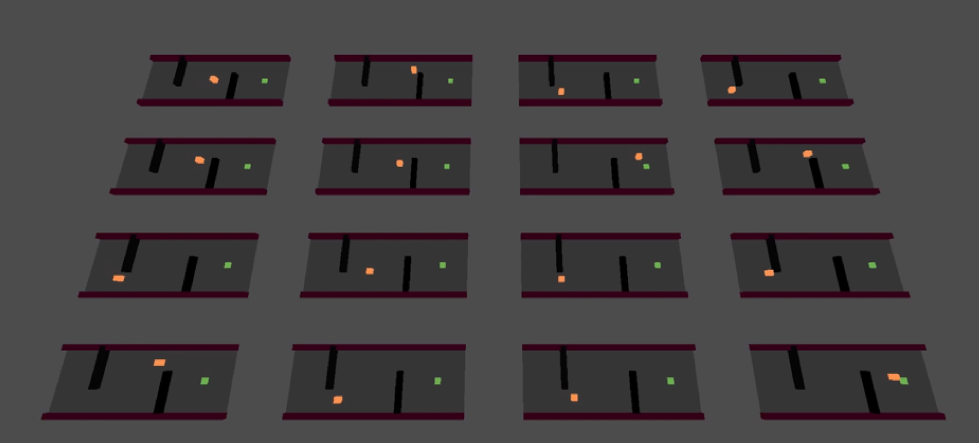
Genesis AI Military Application Research
Research on physics-based AI simulation for military reinforcement learning applications
↗
Air Force AI Education Program
Comprehensive AI education program for Air Force personnel covering reinforcement learning and modern AI tools
↗
Fusion 360 URDF Generation
Robot simulation tool expansion using Fusion 360 API
↗