

National Defense Robotics Competition
Robotics
About The Project
Robotic arm and vehicle development with ROS integration
Key Achievements
—Developed robotic arm and vehicle using Fusion360
—Simulated Gazebo environment using URDF code
—Integrated with Robot Operating System (ROS)
—Initiated and systematized club RO:AD
More Projects

Wartime Resource Analysis Program
Automated logistics calculation system for military supply requirement analysis during wartime operations
↗

Radar Detection Range Analysis
Detection range analysis program for air defense operations
↗
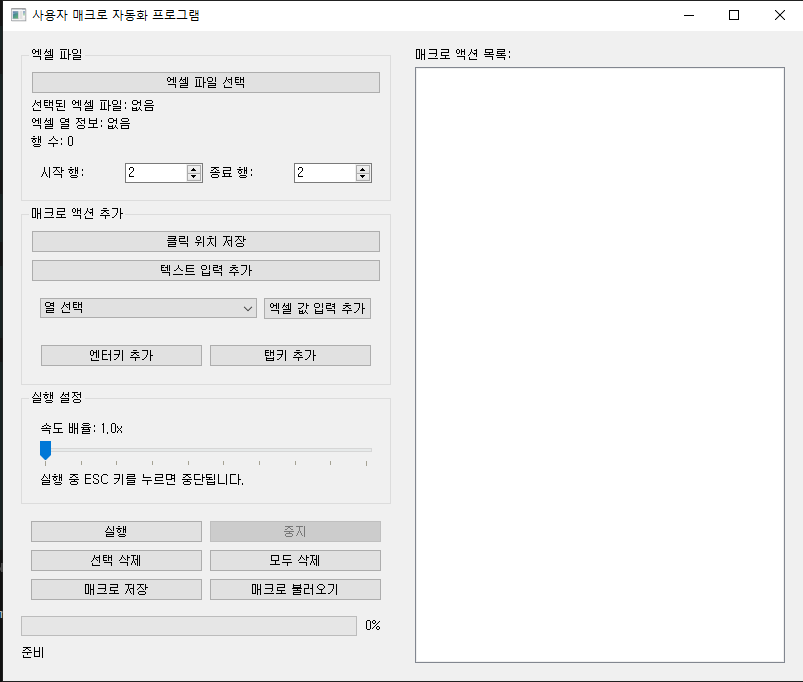
Wargame Simulation Automation
Python macro for automated target data input
↗
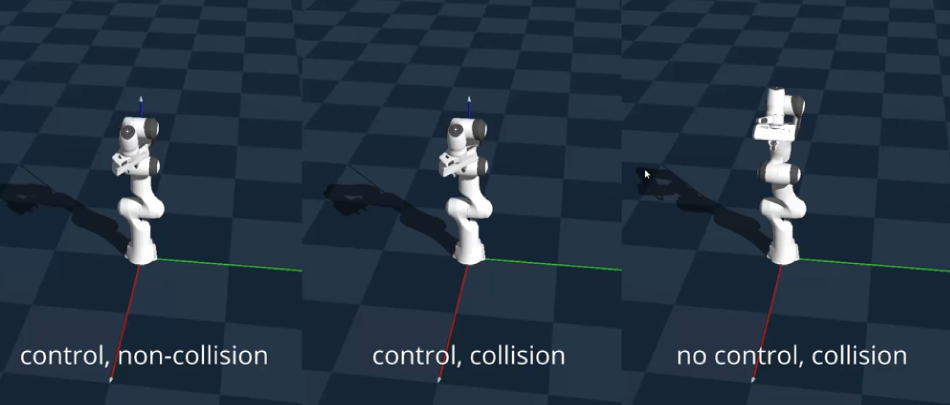
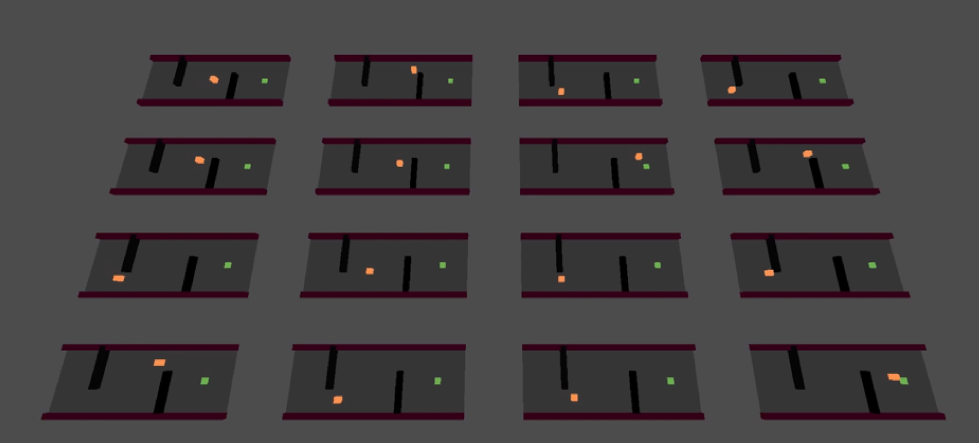
Genesis AI Military Application Research
Research on physics-based AI simulation for military reinforcement learning applications
↗
Air Force AI Education Program
Comprehensive AI education program for Air Force personnel covering reinforcement learning and modern AI tools
↗
Fusion 360 URDF Generation
Robot simulation tool expansion using Fusion 360 API
↗